


PiPER-X 6-DOF Robotic Arm – Agile Manipulation for Robotics & AI Development | AgileX Robotics
Precision Engineering for Intelligent Robotics
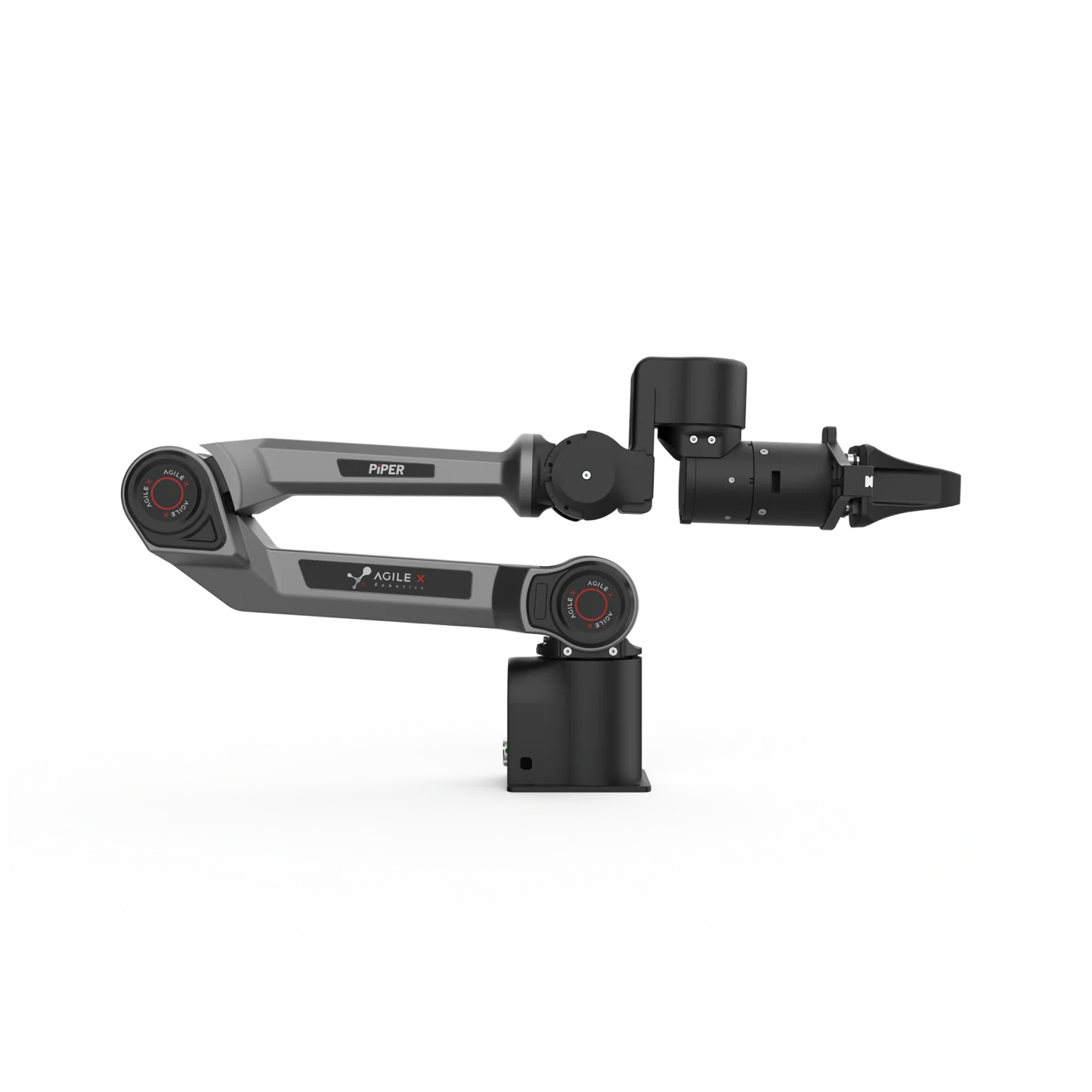
The PiPER-X Robotic Arm is a developer-ready 6-axis robotic manipulator designed for robotics research, AI development, and advanced automation experiments.
Engineered by AgileX Robotics, PiPER-X combines high precision motion control, agile wrist articulation, and open software interfaces, allowing engineers and researchers to rapidly prototype robotic manipulation tasks.
With a 1.5 kg payload capacity, 669 mm reach, and ±0.1 mm repeatability, the arm delivers consistent accuracy and smooth motion for complex manipulation workflows—from laboratory experiments to automation prototypes.
Whether used for robotics research, embodied AI training, teleoperation systems, or automation development, PiPER-X provides the flexibility and reliability required to accelerate innovation in modern robotics systems.
Key Features
6-Axis Precision Manipulation
PiPER-X features 6 degrees of freedom, enabling complex motion trajectories and human-like articulation for advanced robotic manipulation tasks.
Agile Wrist for Flexible Orientation
The advanced wrist structure allows rapid orientation adjustments, making it ideal for insertion tasks, alignment operations, and manipulation in confined spaces.
High Precision Repeatability
With ±0.1 mm repeatability, the arm ensures stable positioning and consistent motion trajectories across repeated operations.
Developer-Friendly Software Ecosystem
PiPER-X supports modern robotics development tools including:
-
ROS robotics framework
-
SDK / API development
-
custom robotics pipelines
This enables rapid integration into research environments and AI robotics platforms.
Desktop Teaching & Motion Replay
Developers can easily record poses or trajectories through host software and replay them for repeatable manipulation experiments and testing workflows.
Built for Robotics Innovation
The PiPER series is specifically designed for robotics research, AI experimentation, and developer workflows, providing open interfaces and flexible control methods.
Technical Specifications
| Parameter | Specification |
|---|---|
| Degrees of Freedom | 6 DOF |
| Payload Capacity | 1.5 kg |
| Reach | 669 mm |
| Repeatability | ±0.1 mm |
| Weight | ~4.5 kg |
| Input Voltage | DC 24V |
| Communication | CAN |
| Control Methods | Drag Teaching / API / PC / Offline Trajectory |
| Operating Temperature | -20°C to 50°C |
| Noise Level | < 60 dB |
These specifications allow PiPER-X to perform precise manipulation tasks in research labs, development environments, and automation prototypes.
Applications
The PiPER-X robotic arm is widely used in advanced robotics applications including:
Robotics & AI Research
Ideal for universities and laboratories developing robotic manipulation algorithms and embodied AI systems.
Automation Prototyping
Rapid prototyping platform for industrial automation workflows and robotics experimentation.
Teleoperation Systems
Supports remote manipulation experiments and robotic control research.
Robotics Education
Perfect for teaching robotics programming, motion planning, and robot control.
Machine Learning Data Collection
Used for generating real-world manipulation datasets for AI training.
Integration & Development
PiPER-X integrates seamlessly into modern robotics ecosystems.
Supported development environments include:
-
ROS / ROS2 robotics frameworks
-
Python robotics development
-
custom robotics control software
This allows engineers to quickly build applications such as:
-
robotic grasping systems
-
teleoperation interfaces
-
AI manipulation training
-
automation workflows
Package Includes
-
1 × PiPER-X 6-DOF Robotic Arm
-
Power and communication cables
-
Software SDK / API
-
Technical documentation
Why Choose PiPER-X
✔ High-precision robotic manipulation
✔ Agile wrist for complex orientations
✔ Open developer APIs and ROS support
✔ Lightweight and compact robotic arm
✔ Ideal platform for AI robotics research