




RH56E2 / RH56DFTP Dexterous Robot Manipulator Hand – 6 DOF Humanoid Robotic Hand | Inspire Robots
Product Overview
The RH56E2 / RH56DFTP Dexterous Robotic Hand is a high-precision anthropomorphic robot manipulator designed for advanced robotic manipulation and humanoid robot development.
Featuring 5 fingers, 6 degrees of freedom, and 12 joints, the robotic hand replicates human-like dexterity and enables flexible object grasping, gesture interaction, and delicate manipulation tasks. Integrated force sensors and tactile sensors provide real-time feedback from the fingertips, finger pads, and palm areas, allowing precise grip control and stable object handling.
Designed with micro linear servo actuators and intelligent control interfaces, the RH56E2 series can be easily integrated into robotic platforms such as humanoid robots, robotic arms, and AI manipulation systems.
Key Features
Human-Like Dexterity
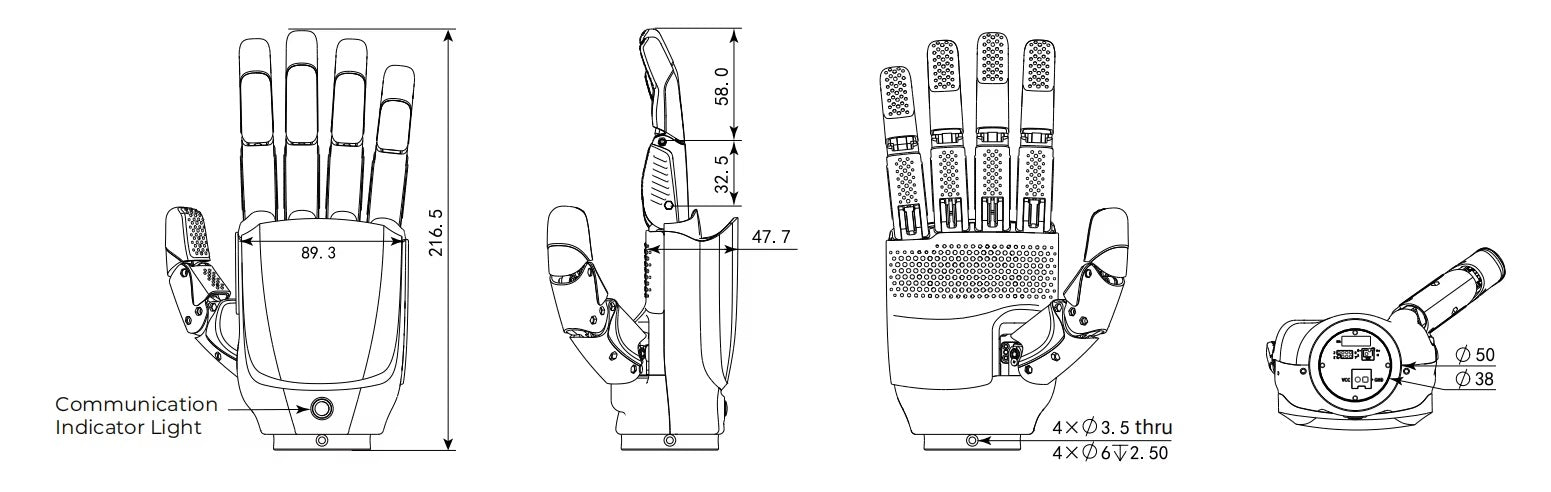
Five-finger anthropomorphic design with 6 degrees of freedom and 12 joints, enabling flexible and natural finger motion for complex manipulation tasks.
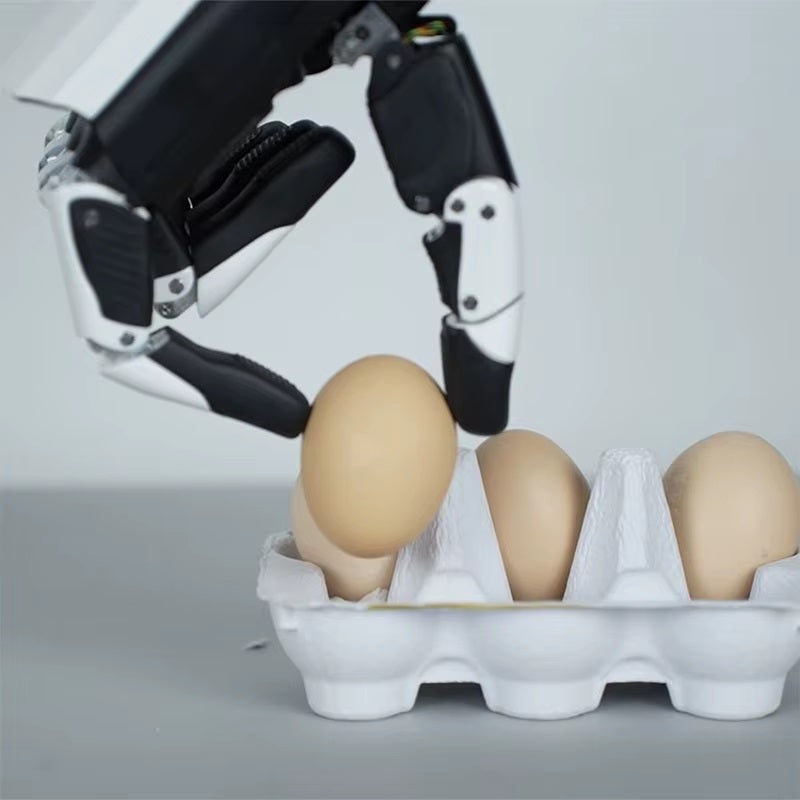
Advanced Tactile & Force Feedback
Multiple integrated force sensors and tactile sensors allow the robotic hand to detect pressure and contact conditions in real time for precise grip control.
High Precision Motion Control
Sub-millimeter repeatability (±0.2 mm) ensures stable and accurate object manipulation for research and automation applications.
Powerful Grip Capability
Up to 30N maximum fingertip gripping force, allowing the hand to grasp and manipulate a wide range of objects.
Flexible Communication Interfaces
Supports industrial communication protocols including Modbus TCP, CAN, and RS485, enabling easy integration into robotic control systems.
Technical Specifications
| Parameter | Specification |
|---|---|
| Model | RH56E2 / RH56DFTP |
| Finger Count | 5 |
| Degrees of Freedom | 6 DOF |
| Number of Joints | 12 |
| Weight | ~790 g |
| Position Repeatability | ±0.2 mm |
| Max Fingertip Force | 30 N |
| Operating Voltage | DC 24V |
| Control Interface | Modbus TCP / CAN / RS485 |
| Force Sensors | 6 |
| Tactile Sensors | Up to 17 |
| Data Refresh Rate | ≥30 Hz |
Applications
The RH56E2 dexterous robotic hand is widely used in:
-
Humanoid robots
-
Robotics research laboratories
-
AI manipulation research
-
Service robots
-
Industrial automation
-
Haptic sensing experiments
Its human-like dexterity and tactile sensing capabilities make it ideal for advanced robotic manipulation and human-robot interaction.
Package Includes
-
1 × RH56E2 / RH56DFTP Dexterous Robot Hand
-
Communication cable
-
Mounting components
-
User manual
FAQ
Q: What robots can this hand be integrated with?
A: The RH56E2 series can be integrated with humanoid robots, robotic arms, and research robotics platforms.
Q: Does the robotic hand support ROS?
A: Yes, it can be integrated into ROS-based robotic systems through supported communication interfaces.
Q: What type of sensors are included?
A: The hand includes multiple force sensors and tactile sensors for real-time grip feedback.