











RH56DFX Dexterous Robotic Hand – 6 DOF Robot Hand with Force & Tactile Sensors | Inspire Robots
Product Overview
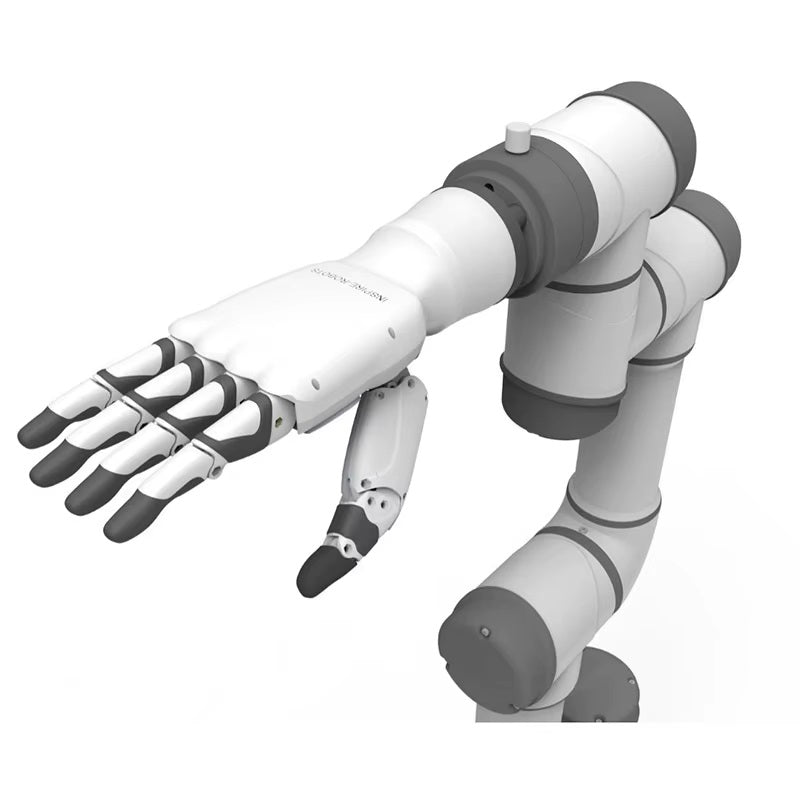
The RH56DFX Dexterous Robotic Hand is a high-precision robotic end effector designed for advanced robotics research, humanoid robots, and industrial automation. With 6 degrees of freedom and 12 joints, it enables highly flexible, human-like finger motion and precise object manipulation.
Integrated force and tactile sensors allow the robotic hand to detect grip pressure and adapt in real time, enabling safe and accurate grasping for delicate or complex tasks.
This lightweight yet powerful robotic hand is ideal for humanoid robots, AI robotics development, prosthetics research, and automation systems.
Key Features
Human-Like Dexterity
6 degrees of freedom and 12 joints enable natural finger movement and highly flexible object manipulation.
Force & Tactile Feedback
Built-in force and tactile sensors provide real-time feedback for stable and precise gripping.
High Precision Control
Excellent repeatability allows accurate handling of delicate or small objects.
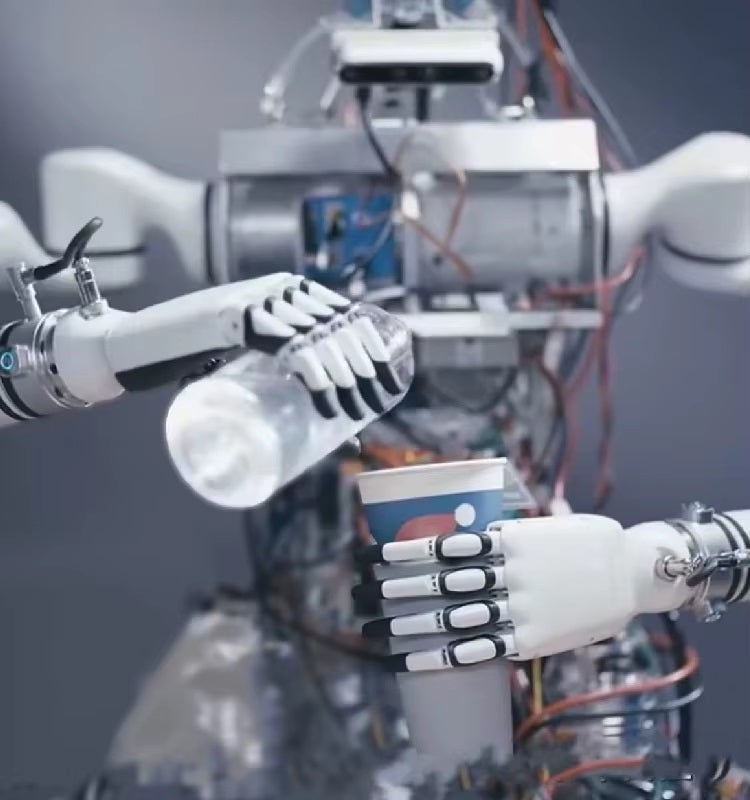
Strong Grip Performance
Up to 30N fingertip force ensures reliable grasping in complex robotics tasks.
Easy Integration
RS485 communication interface makes it compatible with various robotic platforms and control systems.
Technical Specifications
| Feature | RH56DFX (Standard) | RH56DFX-W (with Wrist) |
| Wrist Included | No | Yes |
| Degrees of Freedom (DOF) | 6 | 6 + 2 |
| Motor Joints | 12 | 12 |
| Weight | 540 g | 650 g |
| Operating Voltage | DC 24V ±10% | DC 24V ±10% |
| Repeat Positioning Accuracy | ±0.20 mm | ±0.20 mm |
| Thumb Fingertip Force | 15 N | 15 N |
| Four-finger Fingertip Force | 10 N | 10 N |
| Communication Interface | RS485 / CAN | RS485 / CAN |
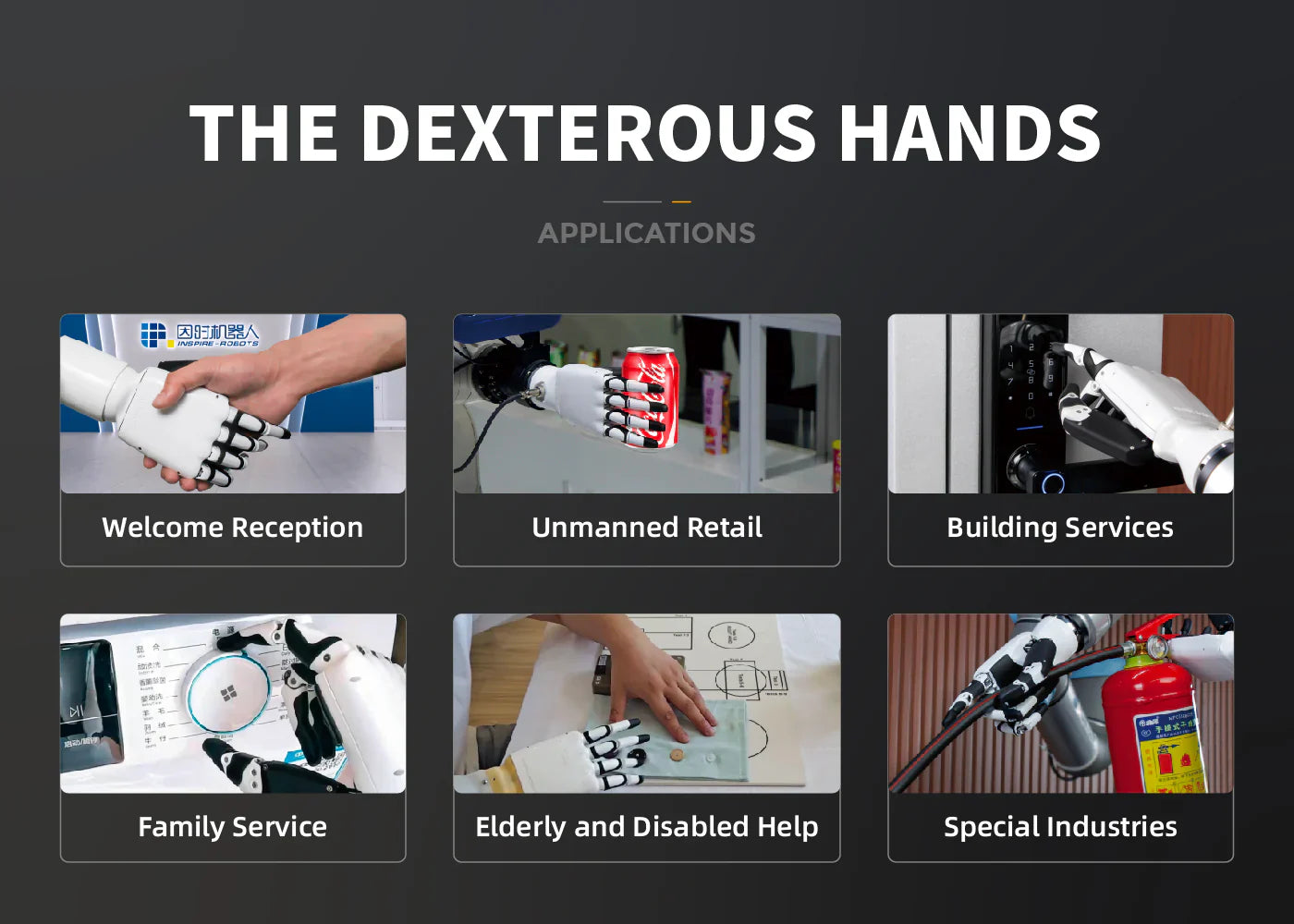
Applications
-
Humanoid Robots
-
AI Robotics Research
-
Robotic Manipulation Experiments
-
Industrial Automation
-
Service Robots
-
Prosthetics Development
The RH56DFX dexterous hand provides the precision, sensing capability, and reliability required for next-generation robotic manipulation systems.