






RH56BFX Humanoid Dexterous Robotic Hand – 6 DOF High-Speed Robot Hand with Force Sensors | Inspire Robots
Product Overview
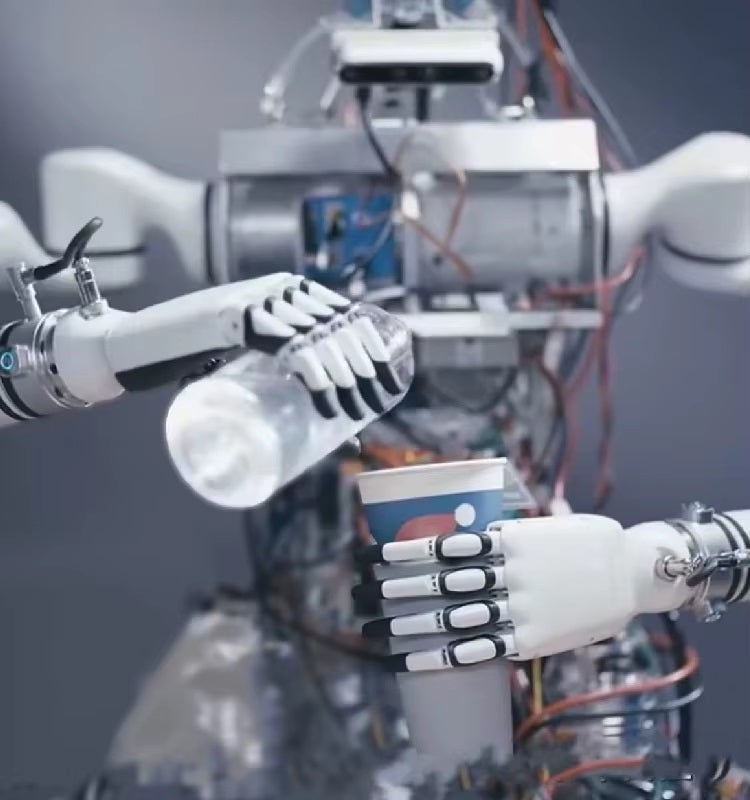
The RH56BFX Dexterous Robotic Hand is a high-speed humanoid robotic hand designed for robotics research, AI manipulation, and advanced human-robot interaction.
Featuring 6 degrees of freedom and 12 joints, the RH56BFX replicates human-like finger movements and enables precise gesture interaction and object manipulation. The hand integrates force sensors and advanced motion control, allowing robots to perform fast and responsive movements with high accuracy.
Compared with other robotic grippers, the RH56BFX is optimized for high-speed motion and interactive gestures, making it ideal for humanoid robots, service robots, and research platforms.
Key Features
High-Speed Dexterous Motion
The RH56BFX is designed for fast finger articulation, allowing robots to perform dynamic movements such as gestures and interaction tasks.
Human-Like Dexterity
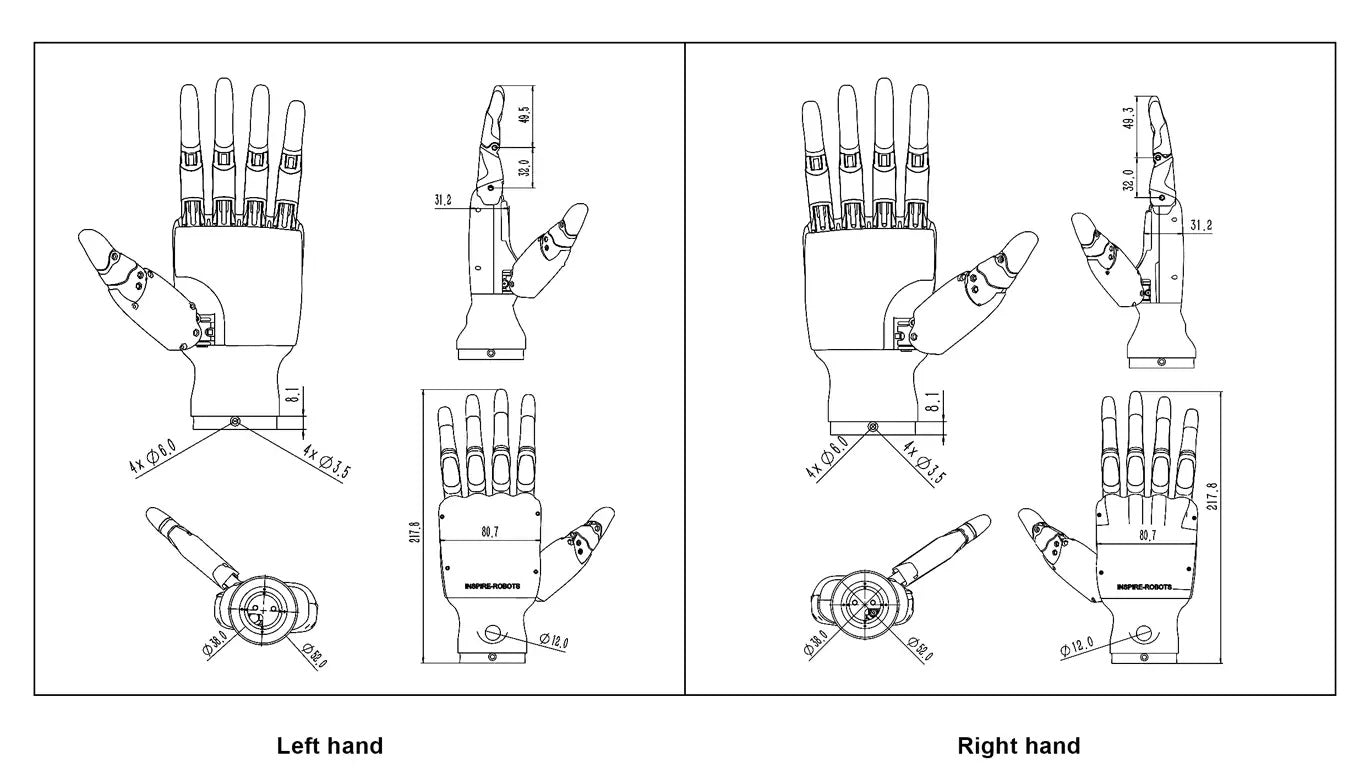
With 6 degrees of freedom and 12 joints, the robotic hand closely replicates natural human finger motion.
Integrated Force Sensors
Built-in force sensors provide real-time feedback to ensure stable and precise manipulation.
High Precision Control
Repeatability of ±0.2 mm allows accurate grasping and manipulation of objects.
Lightweight Design
Weighing approximately 540 g, the robotic hand is easy to integrate into robotic arms and humanoid systems.
Technical Specifications
| Parameter | Specification |
|---|---|
| Model | RH56BFX |
| Degrees of Freedom | 6 DOF |
| Number of Joints | 12 |
| Weight | ~540 g |
| Repeatability | ±0.2 mm |
| Operating Voltage | DC 24V |
| Peak Current | 2A |
| Communication Interface | RS485 |
| Force Sensor Resolution | 0.5 N |
| Max Thumb Grip Force | 6 N |
| Max Palm Finger Grip Force | 4 N |
These specifications enable high-speed and precise robotic manipulation suitable for humanoid platforms.
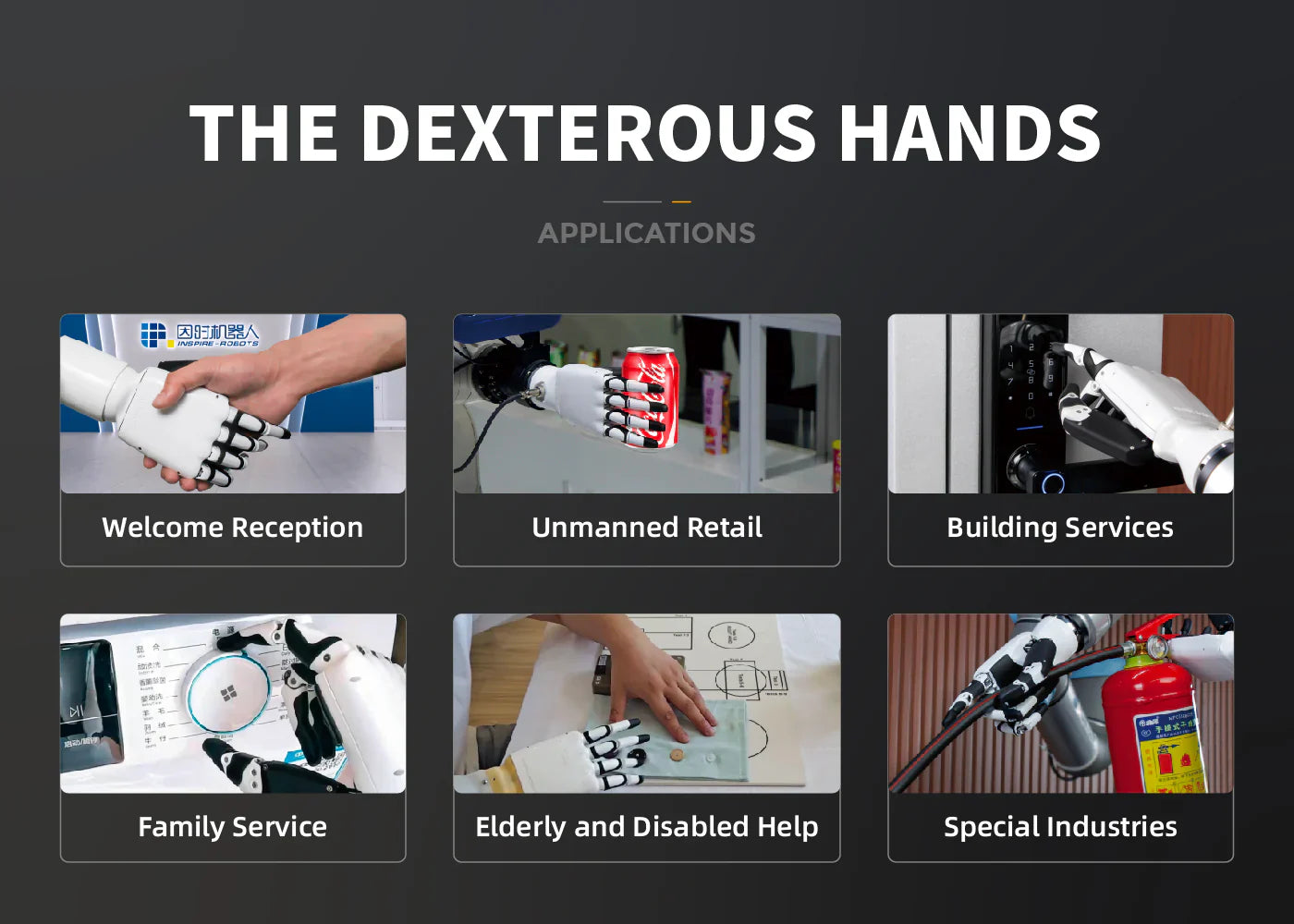
Applications
The RH56BFX robotic hand is widely used in:
-
Humanoid robots
-
Robotics research laboratories
-
AI manipulation research
-
Service robots
-
Human-robot interaction systems
-
Prosthetics research and development
Its fast response and precise motion make it especially suitable for gesture interaction and robotic demonstrations.
Package Includes
-
1 × RH56BFX Dexterous Robotic Hand
-
Communication Cable
-
Mounting Hardware
-
User Documentation
FAQ
Q: Is the RH56BFX compatible with ROS?
A: Yes. The robotic hand supports integration with ROS-based robotic systems.
Q: What robots can this hand be used with?
A: It can be integrated with humanoid robots, robotic arms, and other research platforms.
Q: What communication interface does it support?
A: The RH56BFX uses an RS485 communication interface for stable control.