
DexH13 Vision + Tactile Dexterous Robotic Hand | PaXini
Give robots a human-like sense of touch and precision manipulation
Key Highlights
- 16 DOF (13 active + 3 passive) for human-like movement
- 1,140 tactile sensors with 3,420 signal channels
- Integrated 8MP AI vision system
- Up to 5kg payload capacity
- Industrial-grade EtherCAT / Modbus support
Value Proposition
Teach Robots to Feel, Not Just Move
Traditional robotic grippers can pick objects.
DexH13 allows robots to feel, adapt, and interact with the real world.
By combining vision + multi-dimensional tactile sensing, it enables robots to:
- Adjust grip in real time
- Handle fragile or irregular objects
- Perform human-like manipulation tasks
This is the missing layer between AI perception and real-world execution.
Use Cases
Embodied AI Training
Capture high-quality manipulation data for training next-gen robotic models.
Industrial Automation
Handle complex objects with stability—even in uncertain environments.
Research & Robotics Labs
Perfect for developing advanced manipulation algorithms and human-like control.
Logistics & Service Robotics
Reliable grasping for irregular, soft, or unpredictable items.
Key Features
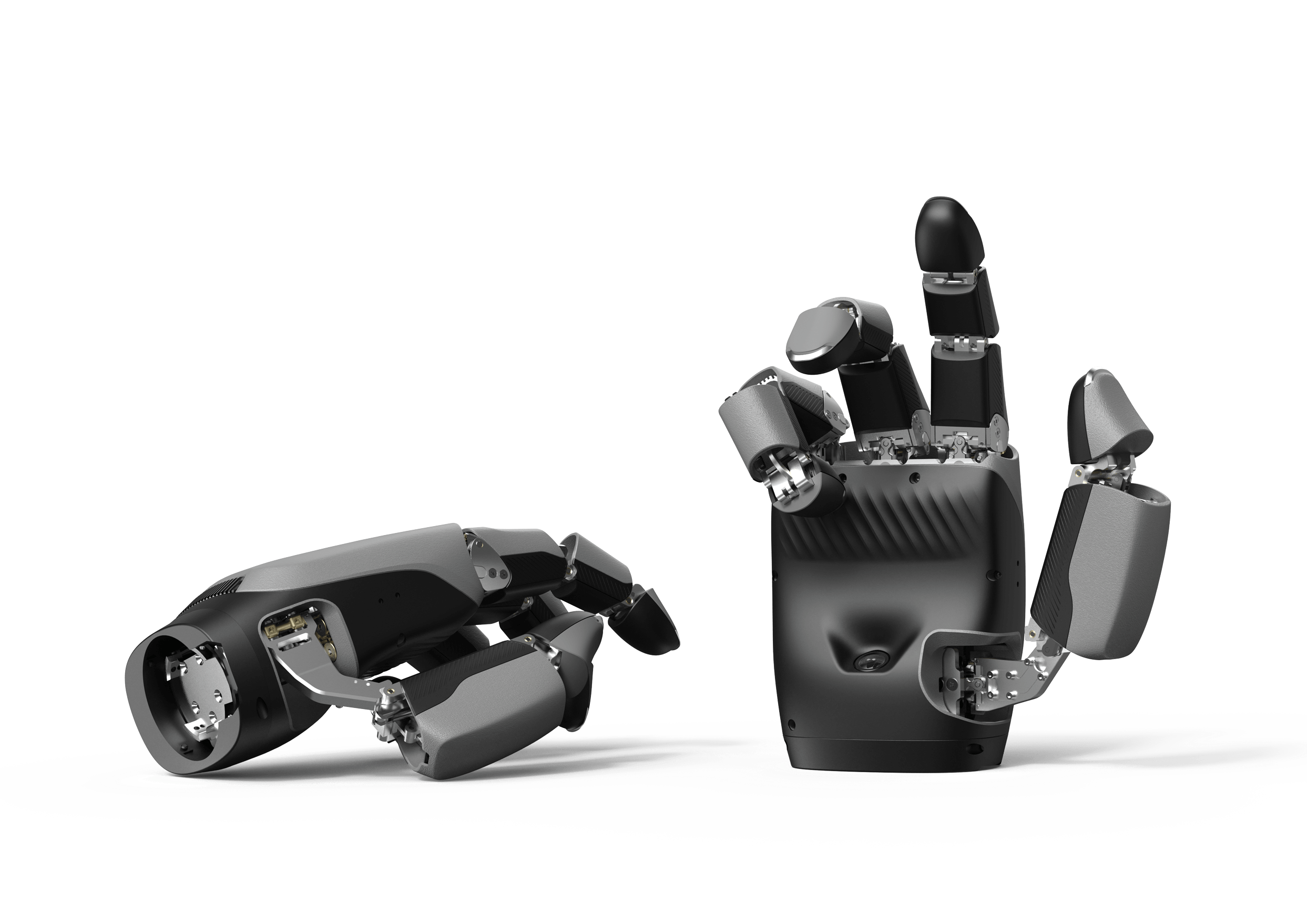
Human-Like Dexterity
16 degrees of freedom enable natural, flexible hand movements for complex tasks.
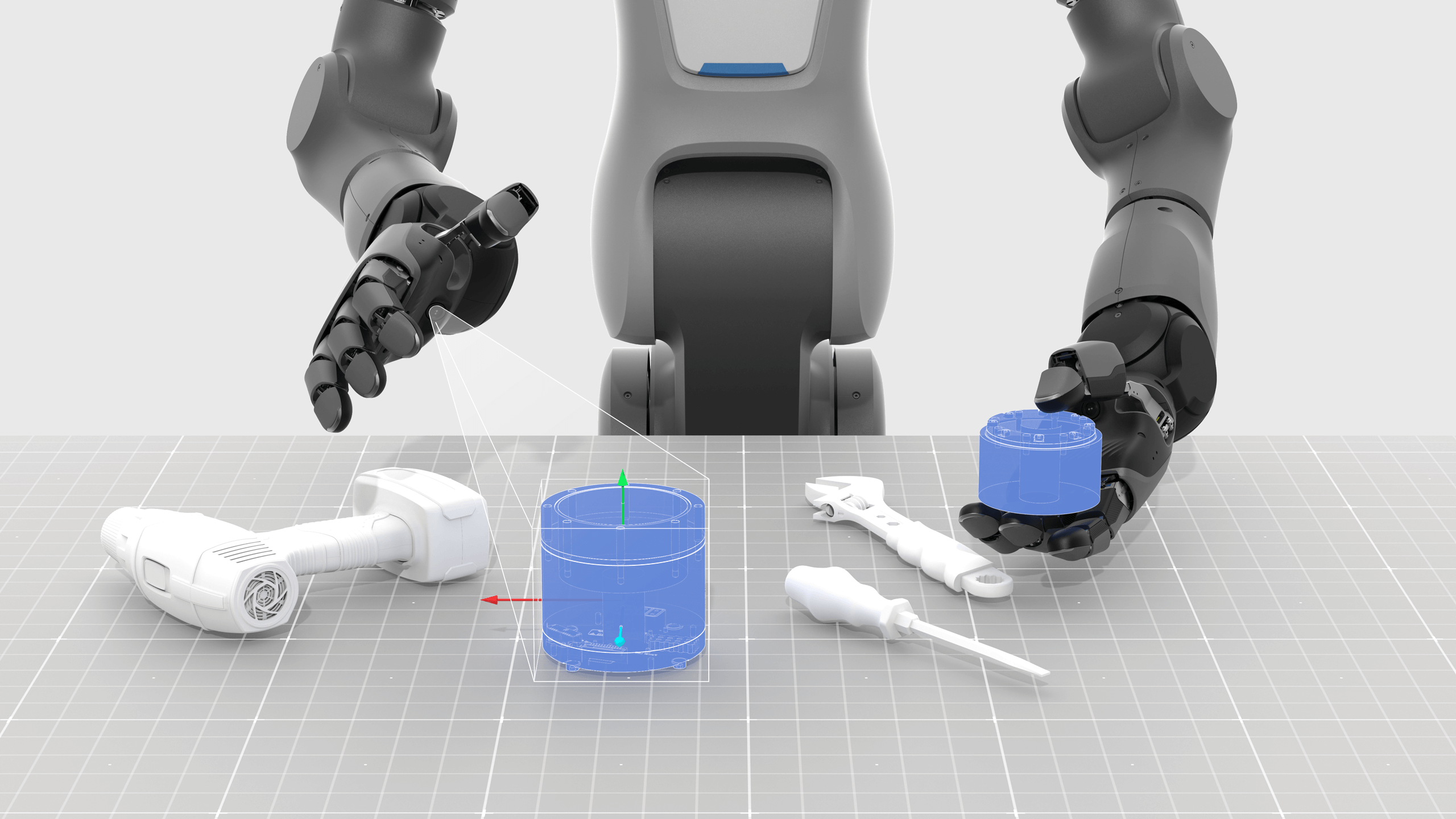
Vision + Touch Fusion
Unlike traditional systems, DexH13 combines:
- AI vision for object detection
- Tactile sensing for real-time feedback
Result: smarter, more stable manipulation.
Ultra-Dense Tactile Feedback
With 1,140 tactile sensing units, the hand detects:
- Pressure
- Contact changes
- Slip and instability
This allows robots to react instantly like humans.
Built for Real Deployment
Designed for real-world integration:
- EtherCAT & Modbus support
- Industrial-ready communication
- Reliable long-term operation (1M cycles)
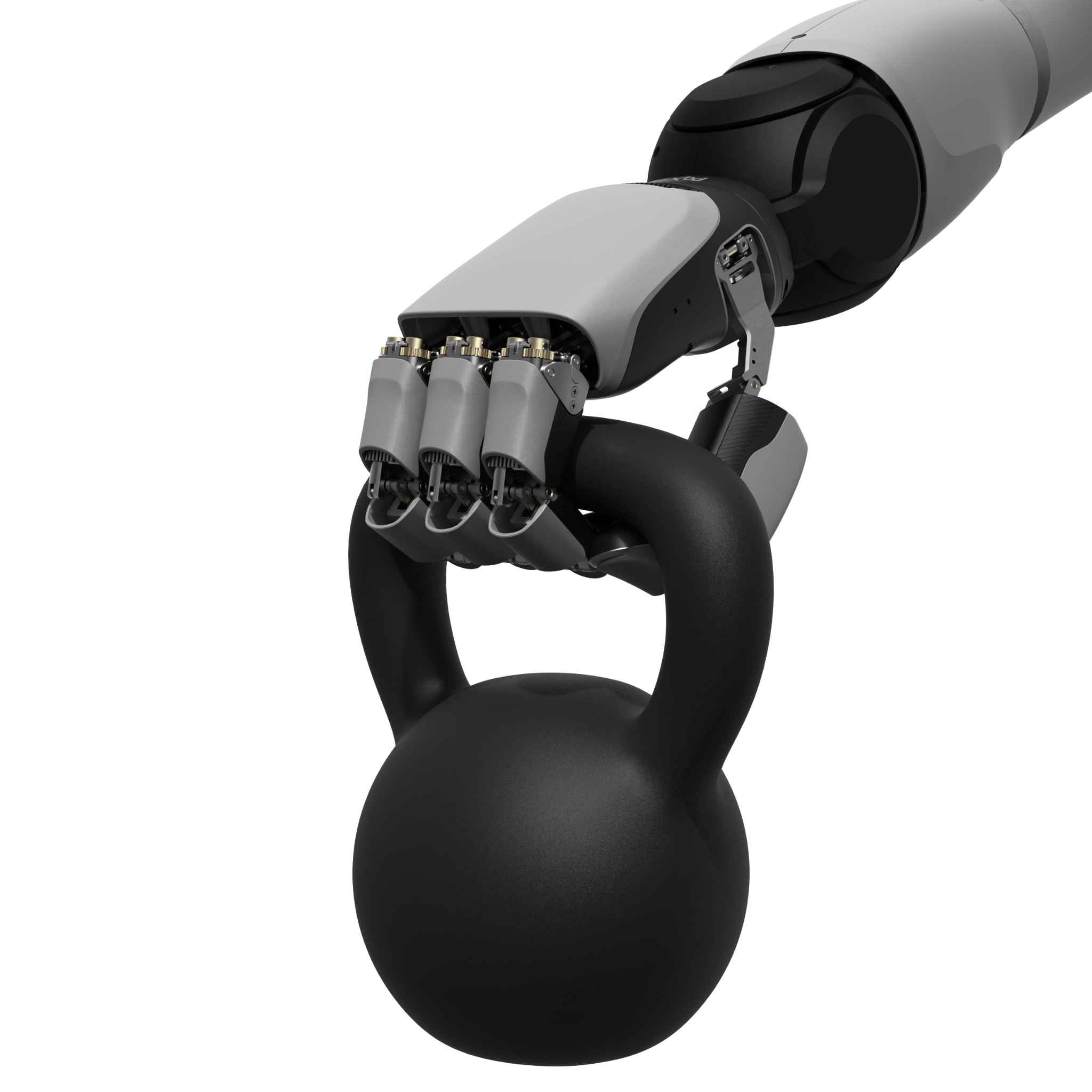
Precision Meets Power
Handles both:
- Delicate tasks (e.g. small objects, knobs)
- Heavy loads up to 5kg
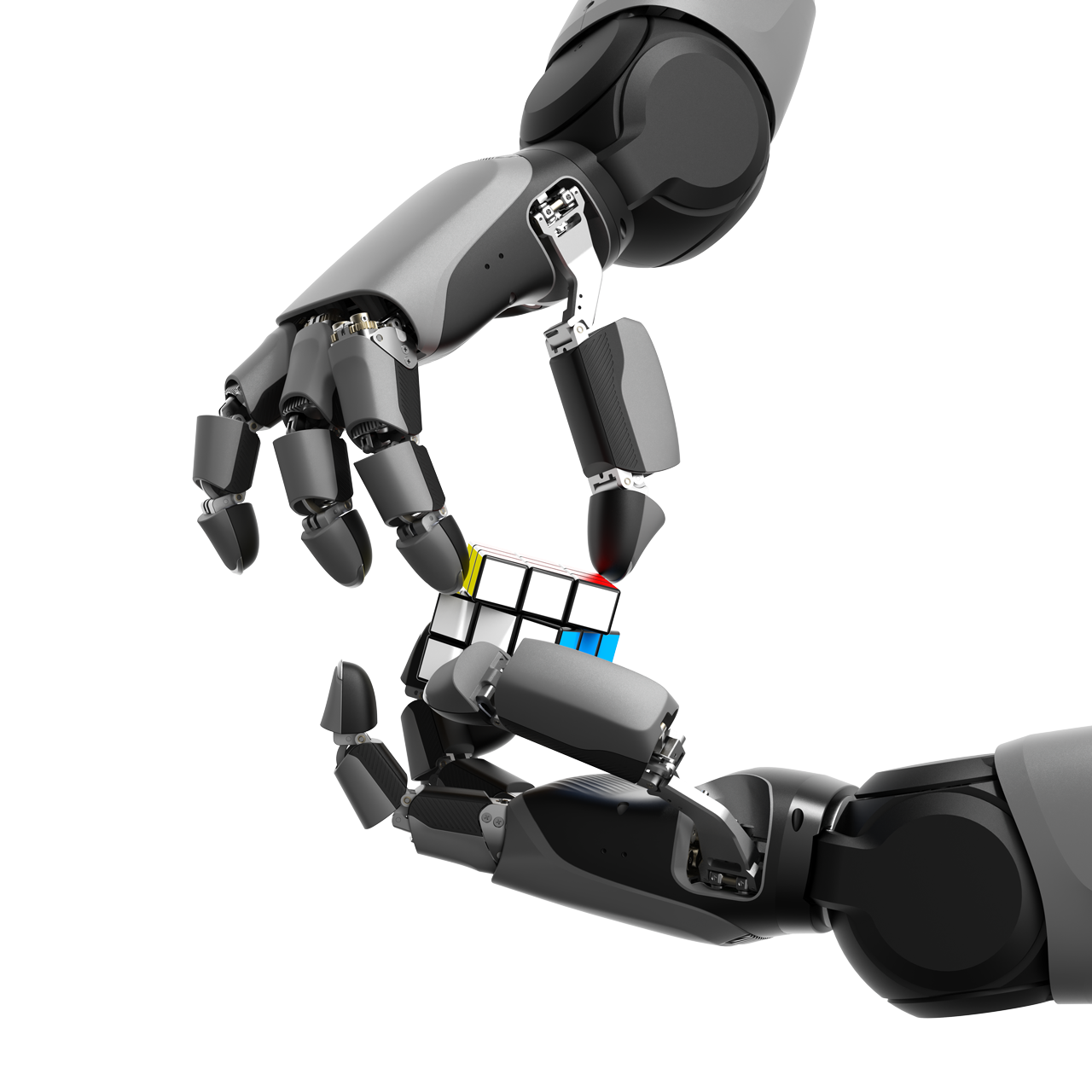
Why It’s Different
From “Pick & Place” to True Manipulation
Most robotic hands:
❌ Open / close
❌ Limited adaptability
DexH13:
✅ Feels contact
✅ Adjusts grip dynamically
✅ Handles real-world complexity
This is a shift from automation → intelligence
Technical Specifications
| Specification | Details |
|---|---|
| Degrees of Freedom | 16 (13 active + 3 passive) |
| Finger Design | 4-finger biomimetic |
| Tactile Sensors | 1,140 units |
| Signal Channels | 3,420 |
| Camera | 8MP RGB AI |
| Payload | 5 kg |
| Max Grasp Diameter | 15 cm |
| Response Time | 1.5 s |
| Communication | EtherCAT / Modbus |
| Lifespan | 1,000,000 cycles |
What’s in the Box
- DexH13 Dexterous Hand ×1
- Integration & communication support
- Developer documentation
FAQ
Is this suitable for AI training?
Yes. It’s designed for high-quality data collection and embodied AI systems.
Can it handle fragile objects?
Yes. The tactile sensing system enables precise force control.
Is it compatible with industrial robots?
Yes. Supports EtherCAT and Modbus for seamless integration.